

With charts and GPS, it is not too difficult to avoid dangers. However, cruisers are increasingly sailing to places like Labrador or Southern Patagonia-such places lack buoyage, and charts often give no more than an outline of the shore. Closer to home, in the Intracoastal Waterway, marks may be far apart, making it hard to stay in the channel.
Thanks to powerful processors and phased-array transducer technology, relatively small forward-scanning sonar has become available. Two years ago, we fitted an Interphase Color Twinscope unit to our 42-foot cutter, Balna, and four months ago, we upgraded it to the same companys SE-200 Sonar Engine. The newer unit incorporates several improvements made as a result of feedback from users.
Photos by Andy O’Grady

What We Tested
Interphase offers various configurations of forward-looking sonar, ranging in price from about $1,700 to $2,500 without display. Each system comprises a transducer, a controller-the “sonar engine”-and a video display.
We tested the SE-200B with through-hull transducer ($1,200 without display). Instead of a single transducer transmitting and receiving sound impulses, Interphase uses eight “elements” capable of transmitting and receiving simultaneously. By varying the phasing of the sound impulses, the unit creates a beam that can be directed up to 60 different directions. This is steered electronically by the SE-200 and the echoes returning from underwater targets are displayed on a screen.
The sonar engine is a red aluminum box (10 x 6.5 x 2.25 inches) with connectors for transducer cables on one side and display and power leads on the other. The transducer draws about 1.1 amps, is flat and measures about 6×2 inches.
Input Options
Interphase offers a variety of options for installing the SE-200 transducers: a single transducer for through-hull mounting, intended to be mounted near the centerline where there is no keel to obscure the sideways view; transom-mounted transducers for horizontal and vertical scanning; and paired transducers, to be mounted on either side of the hull, each producing the signals necessary for its side, avoiding interference from the hull or keel in-between.
Display Output
The unit has many output options. You can connect it to a VGA (video graphics array) or video monitor, to Interphases VGA display, or displays made by other companies. The Interphase display has built-in controls. For use with other displays, there is a separate keypad. I have simultaneously used the Interphase display and my 19-inch computer monitor. The output can be displayed in several different views:
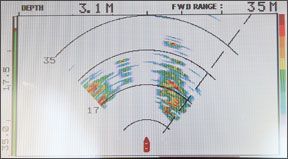
Vertical: The unit displays returns from scanning ahead in a 90-degree arc from the surface to the bottom. The distance ahead that is displayed is typically three to five times the depth.
Horizontal: The unit scans ahead in a 90-degree horizontal arc (180 degrees with twin through-hull transducers) angled down 10-degrees from the surface. A level bottom ahead will register when it is at a distance of about five times the depth.
Down: This records the bottom that has passed under the boat. A reduced version of this display can be shown simultaneously with vertical or horizontal displays. There is also a down zoom display that enlarges any 25 percent of the depth display.
Data: A segment of the screen can display an enlarged depth figure and GPS or other data sourced from an NMEA input.
How We Tested

As with all ocean-tested reviews, the evaluation consisted of at-sea trials for an extended period. Balna is a 42-foot full-keel cutter. We installed a single through-hull transducer in the stem about quarter of the way back from the bow. We fitted the SE-200 in a locker and the display unit at the wheel.
The unit has been primarily used in the Spanish rias (valleys drowned by rising seas) and shallow, often uncharted and muddy rivers in Brazil. Although we have not completely mastered the technology, we feel comfortable in our ability to assess the pros and cons of the equipment.
What It Does
There is a lot of hype surrounding look-forward radar, and it is important for potential buyers to understand what it can and cannot do. Here are six points that stood out after our six-month evaluation.
Learning curve: The views obtained take some getting used to, especially the horizontal view, and there are many options for adjusting the instrument. Even after several months of practice, we are still learning. Dont expect sonar to change your navigation overnight, it will take time and effort.
Signal strength: The unit has an automatic gain control that is satisfactory in many situations; this can be over-ridden when needed. It is important not to use too much gain, which results in false echoes and a frightening mass of red ahead. The strength of the echo is represented in color, from the strongest (red) through shades of yellow and green to blue. Strength will be greater when the bottom is sloping up and weaker when it is sloping down. Hard rocks or obstructions give stronger returns than soft bottoms. Grass and weeds tend to give a weak, diffuse return.
Depth: The shallower the water, the smaller distance ahead that we can see. In 30 feet, we may get an idea of what lies up to 150 feet ahead, but in 10 feet, it will only be 50 feet. This means that we have to adjust our speed accordingly.
False echoes: If the water ahead shoals suddenly, the increased return can be excessive and appear as a red or yellow band stretching down from the surface-just like a brick wall. It can be hard to figure out whether it is a false echo due to excessive gain or if it is an obstruction at the surface.
Range displayed: Normally, the displayed ratio of depth to forward distance is 2:1. In shallow water, the display is crammed up to the top. A depth expansion option changes the display ratio to 4:1 allowing much more of the available screen area to be used. An auto range feature resets the depth and forward range as depth changes. Both these features are new to the SE-200 and are a great improvement over the Twinscope.
What We Use It For
After much trial and error, weve found some practical uses for the various views.
Finding a channel: The horizontal scan is most useful. We see an arc of returns ahead of the boat. If the bottom is level, these are between four and five times the depth ahead and equidistant from us. If its getting deeper ahead the angle at which the beam meets the bottom decreases, return decreases, and the signal becomes weaker, showing up as light green or blue on the screen. Conversely, if it is shoaling, the angle of the bottom gives a stronger yellow or red return, and the signal moves closer on the screen. The most useful display is when the echo is getting stronger and closer in one spot ahead, indicating shoaling water to avoid, or getting weaker and further away, indicating deeper water to steer for. This view is the most difficult to learn to interpret.
Warning of unexpected obstructions when underway:
Where the chart has no soundings, we are constantly on the watch for unexpected rocks or reefs in fjords and rias, these can often rise steeply from great depths. For this, we use the vertical scan, which gives a very easily understood left-to-right view of the bottom ahead. Even though the bottom may only be displayed for three times the depth ahead, a hard shallow obstruction often shows up well ahead of this.
Checking an anchorage: Here we often swap between views to check out the area for unexpected shallows, rocks, or wreckage.
Limitations
The SE-200 is a great tool for many situations, but it is far from perfect, and there are some tasks that we would not rely on it to perform.
Spotting containers at sea: In flat, deep water, the sonar will pick up a surface iceberg or perhaps a log, but given the interference caused by surface waves, I would not rely on the device to spot a container at sea in rough water.
Auto gain for depth: The accuracy of the depth reading depends upon signal gain. If it is too low, there is no return; too high, and you can have false echoes, usually close to the boat, giving a depth that is too shallow. There is a clutter control telling the instrument to ignore returns in a selected depth directly under the boat that helps the problem. However, the depth reading is not very reliable, and we find it better not to use auto gain on depth. Interphase is working to fix this.
Auto depth: The auto depth option should make life much easier as it can adjust the vertical view to varying depth situations. Unfortunately, in combination with auto gain, it often gives false readings. It is better to manually set the gain for each depth range. If the depth reading is not accurate, then the settings for the vertical scan will be incorrect, and a false view will appear.
Interference: We have false echoes appearing on our screen from electrical interference. This was improved, but not totally abolished, by moving the SE-200 to a new location and by grounding the case. Balna has relatively few electrical items compared to many modern boats, so others may experience more trouble than us.
Alarm area: The ability to choose an area of the screen-avoiding areas of interference and false echoes-rather than a set distance ahead, would make this function more usable.

Reaction time: I think this is an inherent difficulty with forward-looking sonar. In shallow water, an obstruction may be detected, but the boat may have arrived at it before the crew can react. It is important to discuss beforehand when to scan, how fast to sail, and what to do if something appears. This was dramatically illustrated for us when we hit a rock 2 seconds after seeing it on the screen. In less than 10 feet of water, we don’t use the sonar if we have an up-to-date chart that shows no dangers, otherwise we motor slowly and stop as soon as anything appears ahead.
Space: We don’t have a lot of room on Balna, and the ideal locker for the SE-200 turned out to be subject to interference. We imagine this problem is common.
Single transducer: I chose to fit a single transducer in the stem. This has led to two problems. First, it is too far forward and exposed to turbulent water, especially when it is rough, which creates interference. Second, it is vulnerable to knocks: in a collision mentioned, even though we were hardly moving, the knock was enough to damage the transducer.
Conclusions
We use our sonar regularly and would feel lost without it in some of the out-of-the-way places we visit. The new model is an improvement on the previous Color Twinscope, but will benefit from further refinement, especially of the gain controls and depth readout. I would recommend the SE-200 to anyone with a special interest in what lies under the waves or anyone planning to visit remote places. But remember, it will take a lot of practice, if it is going to be useful. Longtime cruiser Andy OGrady and his partner, Ulla Norlander, collaborated with Rod Heikel on the informative, illustrated guidebook, Ocean Passages and Landfalls ($53, Imray Lorie Norie and Wilson Ltd.).












