

Autopilots are one piece of electronics gear that truly has something to offer every sailor-from gunkholer to bluewater cruiser. Having this extra crewmember onboard not only eases the burden of shorthanded sailing, but also helps prevent helm fatigue. An autopilot allows solo sailors to use the head, more easily raise sails, or grab a bite to eat. Crewmembers can enjoy a passage, passing the time reading a book or watching the scenery without being a slave to the helm.
While all marine electronics are constantly evolving, major innovations for autopilots tend to be fewer than say VHF radios or chartplotters. In December 2013, we had the opportunity to install and evaluate a recent offering from Raymarine that boasts some major innovations, the Evolution EV-1 autopilot system. We installed the EV-1 aboard our test boat, a 1978 Union 36, and it will be the subject of long-term testing this year, as testers cruise the Atlantic coast and Bahamas. Since durability is an essential factor when rating an autopilot, the jury is still out regarding service longevity; however, we can provide our observations with regard to the installation and initial operation so far.
Autopilots comprise three main components: a course computer or processor, a drive mechanism, and a control head/cockpit display. Other components (depending on the system) can include a fluxgate compass, as well as a rudder feedback or reference indicator.
The display unit is typically located at the helm and provides the interface between user and autopilot. The course computer is the brains of the autopilot. It processes all navigational data, as well as communicates with and directs the other parts of the system. Its normally a stand-alone unit mounted in some dry, safe place belowdecks, although in some cases, it can also be contained in the display unit.
The drive unit converts the electrical data from the processor into the mechanical movement necessary to control the boats rudder. The fluxgate compass tracks and provides vessel heading information to the course computer, while the rudder reference indicator (if required) relays rudder position data back to the course computer.
While there are a number of factors to consider when selecting an autopilot (boat type, displacement, etc.) the biggest difference between the various units will be the drive unit. Autopilots can be grouped loosely into above-deck and belowdeck units, with the latter being further divided into linear, hydraulic, and rotary drives. Above-deck units, or cockpit drives, also can be split into two groups: wheel and tiller pilots. Older-style wheel autopilots comprise a cockpit-mounted motor that uses a belt (similar to an automobile fan belt) to drive a wheel-mounted hub. Newer wheel units feature integrated enclosed-drive pilots. These operate in much the same way, but instead of an open, exposed belt, the motor and wheel sprocket are integrated into a single piece, making for a less cluttered, more simple installation.
Tiller units use a linear arm or ram that has one end mounted to the cockpit, with the other end attached horizontally to the tiller. Wheel autopilots have a manual clutch that allows you to engage or disengage the drive, while tiller units are disconnected by simply lifting the arm from the tiller-mounting pin.
Wheel and tiller units are best suited for smaller boats sailed near shore. Owners of boats longer than 36 feet or those with bluewater aspirations should look for a belowdeck autopilot. The commercial-grade pilots made by WH Autopilots in Bainbridge Island, Washington get high marks from readers.
The type of steering system you have will dictate which drive unit youll need to pair with your autopilot. All auto-pilot manufacturers provide guidance for selecting the drive to match your steering system. The second deciding factor is the boats displacement, which determines the power or size of the drive.
Linear drives are the first choice for boats with cable and quadrant steering. They use a ram that is attached directly to the steering quadrant or (in some cases) rudder post. Boats with hydraulic steering would logically choose a hydraulic drive, which uses a pump inserted into an existing steering hose to control the rudder. Hydraulic pumps can be split into two main types: reversing and constant-running pumps.
Reversing pumps (the most common) run only when needed to move the rudder, running one direction for starboard, then reversing direction for port. Constant-running pumps, as the name implies, run continuously while the autopilot is on. They use an electric solenoid to control the flow of hydraulic fluid to the steering ram, which drives rudder movement to port or starboard.
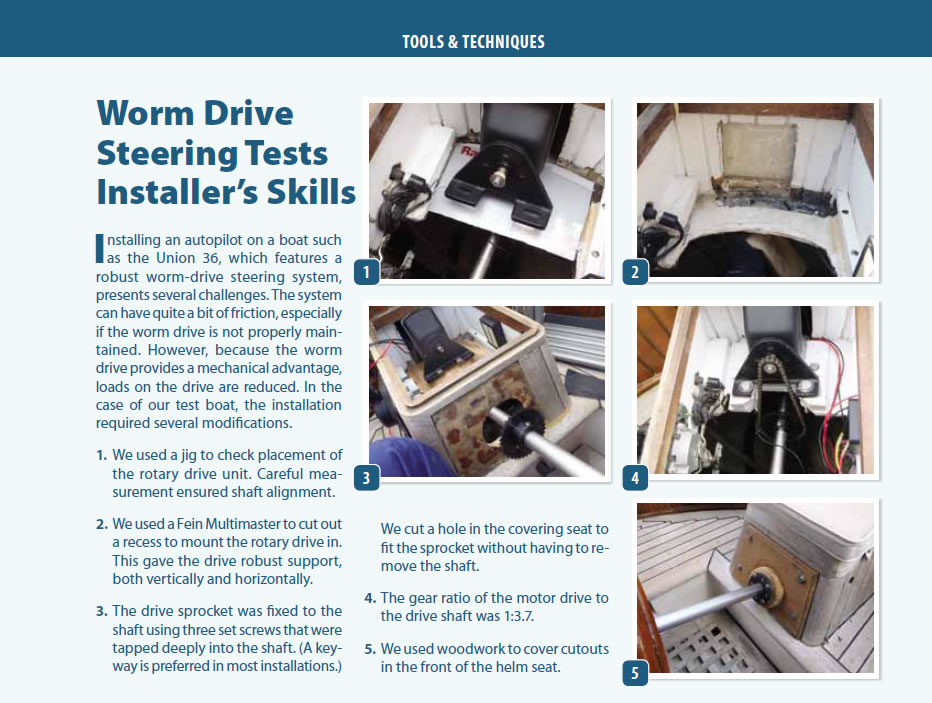
Our Union test boat has worm-gear steering, a durable, but increasingly rare type and one of the more challenging systems to link to an autopilot. We selected a rotary unit (also called a chain drive) as the most practical choice. One advantage of worm drive is that the rotating shaft to which the autopilots drive sprocket attaches has a significant mechanical advantage, so the loads transferred via the sprocket and drive are lower than those common to other steering systems. (The downside of this is no rudder feedback.) This allowed us to attach the drive sprocket to the steering shaft with three set screws tapped deeply into the shaft, rather than the recommended keyway. In general, chain rotary drives are unpopular because the short back-and-forth motion and short lever arm subject equipment to significant wear and tear.
Both linear and rotary drives use an electro-mechanical clutch (controlled by the pilot) to engage the drive when in use. They disengage when the autopilot is turned off or placed in standby, generating very little steering system drag or resistance, if properly installed.
Photos by Frank Lanier

The Evolution EV-1 autopilot system we installed featured an ACU-200 (Actuator Control Unit) and p70 pilot controller. The ACU-200 has a maximum continuous output of 15 amps. The larger ACU-400 rotary drive has a maximum continuous output of 30 amps. This is the maximum output when the drive is operating, which is only intermittently. Autopilot makers figure the pilot will be working 25 percent of the time, but power consumption will vary greatly with conditions. Ideally, the helm is well balanced so that very little power is required for steering. We havent used the pilot enough to get a definitive idea of an average power draw, but we expect current to average between 2.5 and 6 amps on our 12-volt system.
Because the previous system was also made by Raymarine (a Smartpilot X-30), testers were able to use existing rotary drive and SeaTalk NG backbone cabling. SeaTalk NG networking enabled testers to use a single cable connection for power and data from the Evolution ACU to other system components.
From an installation standpoint, the most notable physical difference between the Smartpilot X-30 and the EV-1 is the lack of a fluxgate compass, which is replaced in the new EV-1 system by a sensor core. The heart of the EV-1 system, the sensor core is a nine-axis sensor (actually, the course computer for the entire system) that calculates the boats heading, pitch, roll, and yawl. Raymarine describes the sensor core as fully waterproof. It can be mounted most anywhere-flush mount, bulkhead, left or right of centerline, above- or belowdecks, even upside down. The primary requirements are that the unit be mounted level, facing forward, and away from sources of heat and magnetic interference.
A key benefit to the EV-1 system is that unlike the X-30 (and other autopilot systems in general), you don’t need to calibrate it. You simply enter basic info-vessel style, drive type, rudder hard-over time, etc. This eliminates having to get underway and make big, slow circles while the autopilot calibrates itself.
The control algorithms used by the EV sensor core allow the autopilot to automatically evolve and adapt to both sea conditions and the vessels steering characteristics without any user adjustments. Users can also modify the system via three user-selectable performance modes (leisure, cruise, and performance). Cruise mode steers according to a blend of economy and performance, while the performance mode provides the tightest heading control (but also creates the most work for the drive).
After installing the EV-1, we used it daily during a two-week trip down the Atlantic Intracoastal Waterway (ICW) and while crossing the Gulf Stream from Fort Lauderdale, Fla., to West End, Bahamas. We then used it for an additional five days while cruising the Abacos, before docking our test boat at Marsh Harbor, Great Abaco Island. During the trip we used the EV-1 under both power and sail while creating and following routes, as well as dropping and using go-to waypoints on the fly.
While cruising the ICW, we used the autopilot as much as possible, both while transiting larger bodies of water and while motoring along straighter portions of the waterway. Use along the ICW was done by setting a course, then engaging the autopilot and making course adjustments as needed using the one-degree or 10-degree course change buttons. In addition to ditch driving, our trip along the ICW was interspersed with a couple of outside runs, which allowed us to navigate by entering waypoints and building routes utilizing our Raymarine e7 multi-function display. We also used this method while crossing to and cruising in the Bahamas.
We experienced calm to moderate seas on outside legs heading south, however, the Gulf Stream provided a workout for the EV-1, with 4- to 6-foot seas during part of our crossing.
Testers tried each of the three user-selectable modes (leisure, cruise, and performance) while in the ICW and open ocean. The leisure mode steered a looser course than we preferred, so we decided to stick with the cruise and performance mode. We saw little difference in how hard the pilot worked in the performance mode, as compared to the cruise mode, so after a few days, we began using only the performance mode.
During our underway checks after first installing the system, we noted a bit of seeking from port to starboard, presumably a result of the unit learning the quirks of our test vessels steering system. This wandering gradually diminished to an acceptable level for the remainder of our trip.
The unit worked well both on the flat waters of the ICW and on the rougher seas encountered during our passage to the Bahamas.
Operation of the drive was smooth and quiet, with no noticeable jerking or whining noted while steering or when making sharper than normal turns. The drives noise levels were moderate to low, with no indication (audible or otherwise) that the drive was straining excessively, even while rolling in the beam-to seas in the Gulf Stream. The p70 pilot controller was simple to operate and easy to read in all lighting conditions (from complete darkness to bright sunlight).
So far, our initial experience with the EV-1 system is positive, although long-term testing and use will tell the tale. We will look more closely at power draw and key features in an update later this year.
Theres no argument that having an autopilot onboard can improve the lot of most any sailor. That being said, what an autopilot doesn’t bring to the table is the seamanship skills and decisionmaking abilities of a vessels captain.
At best, an autopilot should be viewed as a capable, but blind crewmember that will take you wherever you want to go, regardless of the consequences. It can’t dodge that sea buoy youve plugged in as a waypoint and wont object to steering over that sandbar if thats the course youve laid.













Darrell,
Where can I find information about installing an autopilot system with a rotary drive type 1?
I just purchased a 1996 Hutner 376, and it has only a rotary drive and a Raymarine control head P70S.
Every time I engage the control unit, it shows a fixed heading (60deg), and it does not adjust for any heading changes.
I started troubleshooting and cannot find the autopilot unit! The controller is connected directly into the rotary drive. I would like to hook up an autopilot, but I never did it. Any advice?
Thanks,
Gabriel
Darrell,
I have a Mao Ta 36, essentially the exact same boat as the Union you tested. I am about to purchase the same rotary drive, and install the same way. Do you have additional info after several years of sailing with the system?
Thanks in advance!
Chris